تماشا کنید: پهپاد FlyingToolbox به رباتها اجازهی تعویض ابزارها با دقتی بیسابقه در حین پرواز را میدهد
پژوهشگران دانشگاه Westlake در چین موفق به توسعه سامانهای نوین شدهاند که امکان تبادل ابزار میان پهپادها را در حین پرواز فراهم میکند.
این سامانه که FlyingToolbox نام دارد، نخستین نمونهای است که در آن پهپادهای چندملخه توانستهاند عملیات جفتسازی دقیق و انتقال ابزار را در میانهی هوا انجام دهند.
زمانی که یک پهپاد مستقیماً در بالای پهپاد دیگر پرواز میکند، جریان هوای روبهپایین ناشی از ملخهای آن، تلاطم شدیدی به وجود میآورد. این جریان که پایینرانش (Downwash) نامیده میشود، میتواند به سرعتی بیش از ۱۳ متر بر ثانیه برسد و پایداری پهپاد زیرین را مختل کند.


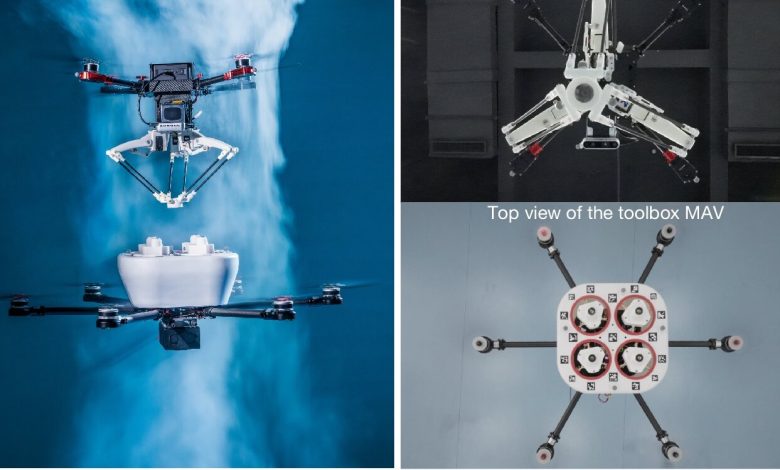
این پدیده، تشکیل آرایشهای پروازی پشتهای یا انجام عملیات دقیق مشترک میان پهپادها را تقریباً غیرممکن کرده بود. سامانهی FlyingToolbox این مشکل را با ترکیب دو نوع پهپاد برطرف کرده است. پهپاد پایینی که پهپاد جعبهابزار (Toolbox drone) نامیده میشود، مجموعهای از ابزارها را حمل میکند، در حالی که پهپاد بالایی که پهپاد دستکاریکننده (Manipulator drone) خوانده میشود، با بهرهگیری از یک بازوی رباتیکی وظیفهی برداشتن و بازگرداندن ابزارها را در حین پرواز بر عهده دارد.
این دو پهپاد در همکاری با یکدیگر عملکردی مشابه جراح و دستیار او دارند که در جریان عمل جراحی ابزارها را میان خود رد و بدل میکنند. برای حفظ پایداری پروازی، این سامانه از ترکیبی از پیشبینی بلادرنگ جریان هوا، سازوکار جفتسازی مغناطیسی و ردیابی دیداری درونبرد استفاده میکند.
شبکهای عصبی، شدت و جهت پایینرانش را تخمین میزند و بدین ترتیب پهپاد پایینی میتواند بهصورت خودکار موقعیت خود را تنظیم کند. پهپادها برای همترازی دقیق از ردیابی کدهای QR بهره میگیرند و حتی در شرایط هوایی متلاطم نیز به دقتی در حد کمتر از چند میلیمتر دست مییابند.
در آزمایشهای انجامشده، پهپادها توانستند به میانگین دقت جفتسازی کمتر از ۱ سانتیمتر برسند. در جریان آزمایشها، ۲۰ بار عملیات جفتسازی متوالی با موفقیت کامل انجام شد، حتی در شرایطی که جریانهای هوایی شدید وجود داشت. طراحی این سامانه همچنین امکان اجرای توالیهای چندمرحلهای تعویض ابزار توسط چند پهپاد در نزدیکی یکدیگر را فراهم کرد.
سازوکار جفتسازی یکی از عوامل کلیدی موفقیت این سیستم بود. بازوی پهپاد دستکاریکننده دارای حفرهای با صفحهی فلزی داخلی است، در حالی که پهپاد جعبهابزار به کانکتورهای مغناطیسی مخروطی مجهز شده که روی سیمهای کشسان نصب شدهاند.
هنگامی که دو پهپاد بهدرستی تراز میشوند، آهنرباها بهصورت خودکار در جای خود قفل میشوند و سیمهای کشسان خطاهای جزئی در همترازی را جذب میکنند. نتایج نشان میدهد این طراحی نسبت به سامانههای جفتسازی هوایی پیشین، که معمولاً دقتی در حدود ۶ تا ۸ سانتیمتر داشتند، پیشرفت چشمگیری داشته است.
رویکرد تیم Westlake، سطحی از کنترل و تکرارپذیری را فراهم میکند که میتواند پهپادها را به اجرای مأموریتهای مشترک و پیچیدهتر در آینده توانمند سازد. سامانهی FlyingToolbox نشان میدهد که پهپادها میتوانند فراتر از وظایفی همچون تصویربرداری یا بازرسی ساده، وارد حوزهی انجام کارهای واقعی در فضاهای هوایی شوند.

این دستیاران پرنده قادر خواهند بود در محیطهایی به کار گرفته شوند که حضور انسان در آنها خطرناک است، از جمله مناطق فاجعهزده، تعمیرات برجهای بلند یا بازرسیهای صنعتی. در حالی که آزمایشهای فعلی تنها در محیطهای کنترلشدهی داخلی انجام شده است، پژوهشگران قصد دارند این سامانه را برای استفاده در فضای باز نیز تطبیق دهند.
آنان همچنین در حال توسعهی بازوهای رباتیکی با درجات آزادی بیشتر و سامانههای ادراکی پیشرفتهتر هستند تا بتوانند عملیاتهای پیچیدهتری را مدیریت کنند. تیم تحقیقاتی بر این باور است که این پیشرفت میتواند شیوهی بهکارگیری پهپادها در مأموریتهای گروهی را متحول سازد. با فراهم شدن امکان اشتراک ابزار و تقسیم وظایف، پهپادها قادر خواهند بود مانند نیروی کاری هوایی هماهنگ عمل کنند و مأموریتهایی را انجام دهند که فراتر از تواناییهای فردی هر یک از آنهاست.
نتایج این پژوهش در مجله Nature منتشر شده است.



