ویدیو: دست رباتیک ۱۶ مفصلی، قوطی نوشابه را بینقص باز میکند، آیفون را مانند انسانها نگه میدارد!
یک شرکت مستقر در کالیفرنیا، یک دست رباتیک چندکاره معرفی کرده است. این دست رباتیک با نام Aero Hand Open، که یک دست رباتیک با محرک کمتر (Underactuated) و متنباز از شرکت TetherIA است، با هدف حل دشوارترین مشکل صنعت رباتیک، یعنی دستکاری ماهرانه و ظریف (Dexterous Manipulation)، طراحی شده است.
«شو دونگ»، مهندس مسئول TetherIA، گفت: «ما چیزی را به اشتراک میگذاریم که تیممان سخت مشغول ساخت آن بوده است: Aero Hand Open – یک دست رباتیک ماهر با ساختار مبتنی بر تاندون و متنباز، که برای هوش مصنوعی مجسم (Embodied AI) ساخته شده است.»
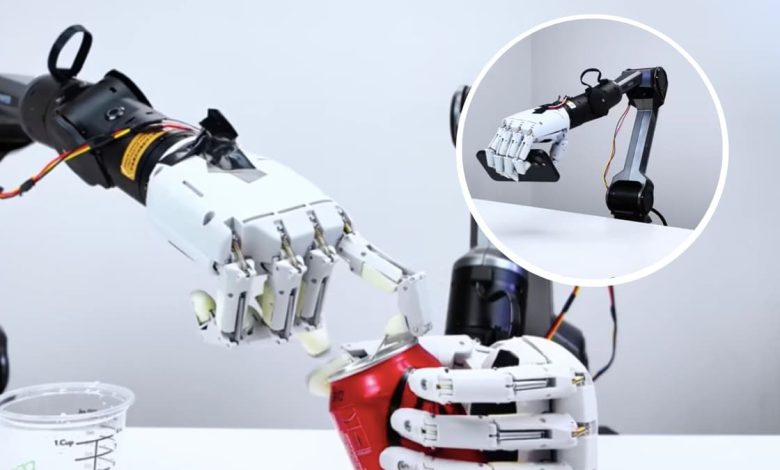
این دست رباتیک دیده میشود که یک پیچ M5 را میگیرد، یک آیفون را برمیدارد و با دقت یک قوطی نوشابه را باز میکند.
مزیت Aero Hand در برخورد با اشکال غیرمعمول
دونگ اظهار داشت: «این ترکیبی از دقت و قابلیت است که ما هدف قرار داده بودیم – و شما واقعاً میتوانید یکی از آنها را داشته باشید.»


مزیت Aero Hand در برخورد با اشکال غیرمعمول، ناشی از طراحی با محرک کمتر (Underactuation) آن است. بهجای قرار دادن موتور در هر مفصل، کابلهایی (تاندونها) از میان انگشتان عبور داده شدهاند که اجازه میدهند با یک کشش ساده، چندین بخش بهطور همزمان خم شوند. این امر باعث ایجاد انطباقپذیری میشود – یعنی دست به جای مقاومت، با شکل اشیاء سازگار میشود – که در گرفتن اشیاء روزمره بسیار کارآمد است. طبق گزارش TechEBlog، تیم دونگ که بر اساس سالها تجربه کار با رباتهای انساننما ساخته شده، قطعات داخلی را سادهسازی کرده است تا هر کسی با حداقل تجهیزات بتواند آنها را مونتاژ کند.
TetherIA قصد دارد با ارائه یک پلتفرم کاملاً مستند، ماژولار و مقرونبهصرفه که میتواند با استفاده از پرینت سهبعدی استاندارد و قطعات الکترونیکی آماده تکثیر شود، تحقیقات دستکاری ماهرانه را قابل دسترستر کند.
Aero Hand Open بر سادگی تمرکز دارد
بر خلاف بسیاری از دستهای رباتیک موجود که به محرکهای اختصاصی گرانقیمت یا مجموعههای مکانیکی پیچیده متکی هستند، Aero Hand Open بر سادگی، قابلیت اطمینان و شفافیت تمرکز دارد. هر مفصل با استفاده از محرک تاندونی برای بهرهوری مکانیکی بهینه شده است، که ضمن حفظ طراحی سبک و جمعوجور، حرکت روان و طبیعی را ممکن میسازد.
بر اساس جزئیات موجود در GitHub، این سیستم فریمور (Firmware) متنباز (مبتنی بر ESP32) و نرمافزار کنترلی سازگار با ROS2 را ادغام میکند که امکان یکپارچهسازی آسان در محیطهای تحقیقاتی و آموزشی را فراهم میسازد. این مخزن به عنوان یک مرجع کامل سختافزاری و نرمافزاری متنباز برای توسعهدهندگان، دانشجویان و علاقهمندان به رباتیک عمل میکند.
معماری مبتنی بر تاندون، حرکت روان و طبیعی ارائه میدهد
ساختار کاملاً پرینت سهبعدی این دست رباتیک، مونتاژ آن را آسان کرده است. طراحی سبک وزن سیستم نیز به استفاده راحت از آن کمک میکند. نوآوری TetherIA کاملاً مقرونبهصرفه است؛ بهطوری که یک کیت کامل آن ۳۱۴ دلار هزینه دارد.
این شرکت فاش کرد که ماژول کنترل از راه دور (Teleoperation Module) سیستم، امکان کنترل از راه دور بیدرنگ Aero Hand Open را با استفاده از دستکشهای داده (Data Gloves) به همراه بازوهای رباتیک یا رابطهای رباتیک سازگار فراهم میکند. این قابلیت به کاربران اجازه میدهد تا حرکات انگشت انسان را برای آزمایشهای گرفتن و دستکاری بصری، به دست رباتیک نگاشت کنند.
طبق گزارشها، قطعات پرینت سهبعدی سیستم TetherIA ممکن است بسته به تنظیمات پرینتر و مواد، دارای تغییرات تلرانس (دقت) باشند. مکانیسم مبتنی بر تاندون برای حفظ حرکت یکنواخت، نیازمند تنظیم منظم کشش است. همچنین گزارشها حاکی از آن است که بارگذاری بیش از حد مفاصل یا اعمال گشتاور زیاد ممکن است باعث تغییر شکل مکانیکی یا آسیب به سِروو موتورها شود.



